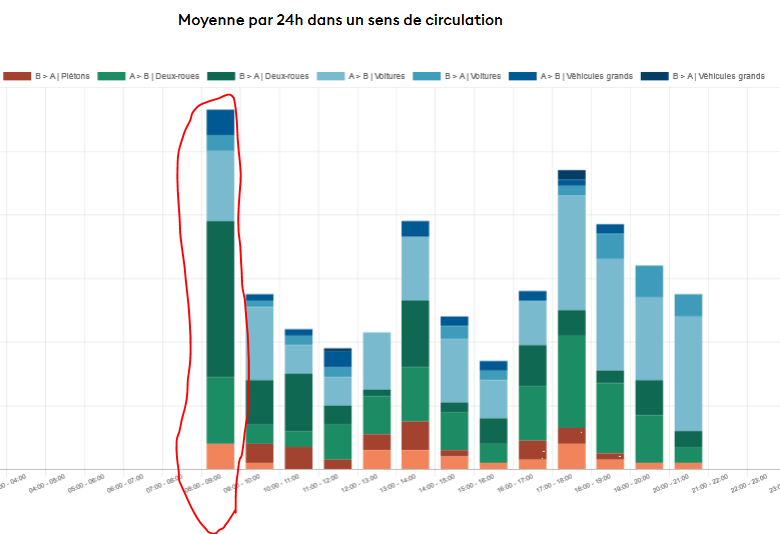
Yes, I’m afraid that such strong shading and contrast is a potential issue for the way that a V1 works (bounding boxes).
It is not a light effect that can be corrected with filters as it is about the shape of the “object” that will be detected by the pixelated image.
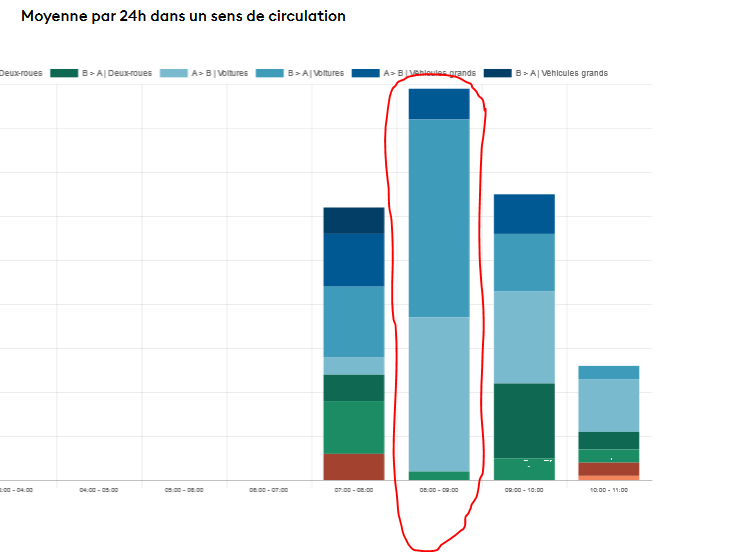
The S2 works in a different way and “recognises” an object as either a bike or a car. If it is a bike with a shadow, it might be the size of a car, but won’t look like one so should not be classified as one. However, it is possible that the bike will also not “look like a bike” to the machine either, so in this case it would most likely be rejected and not counted. We’d need to test it to take a look.
In terms of the data validity, we are hoping to bring data annotation to the dashboard in the near future, but there is still other priority work to be done on the S2 including night counting, so I’m not sure when it might happen.
If anyone has ideas for this (other than moving the location) I’d be interested to hear them.
Hello,
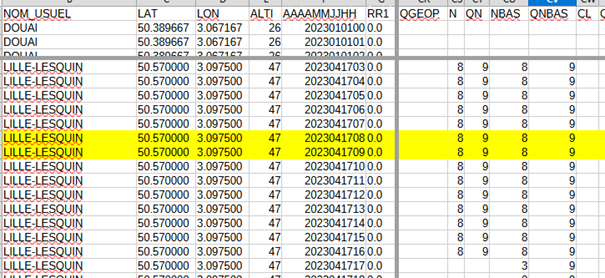
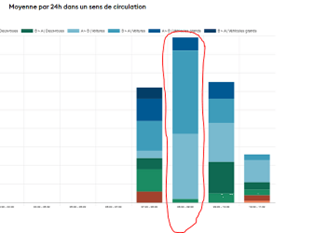
To continue on this thread, it is possible to cross Telraam data with weather data.
When observing Cloudiness, a high score shows reliable traffic data and a low score shows bad traffic data.
The cloudiness index is interesting because it indicates good cloud cover and limited object shadows. But it can also be assumed that it influences the use of cycling and walking…
I was able to make this observation on V1 sensors, have you done the same on V2 sensors?